FMECA Analysis on Driverless System for a Formula Student Vehicle
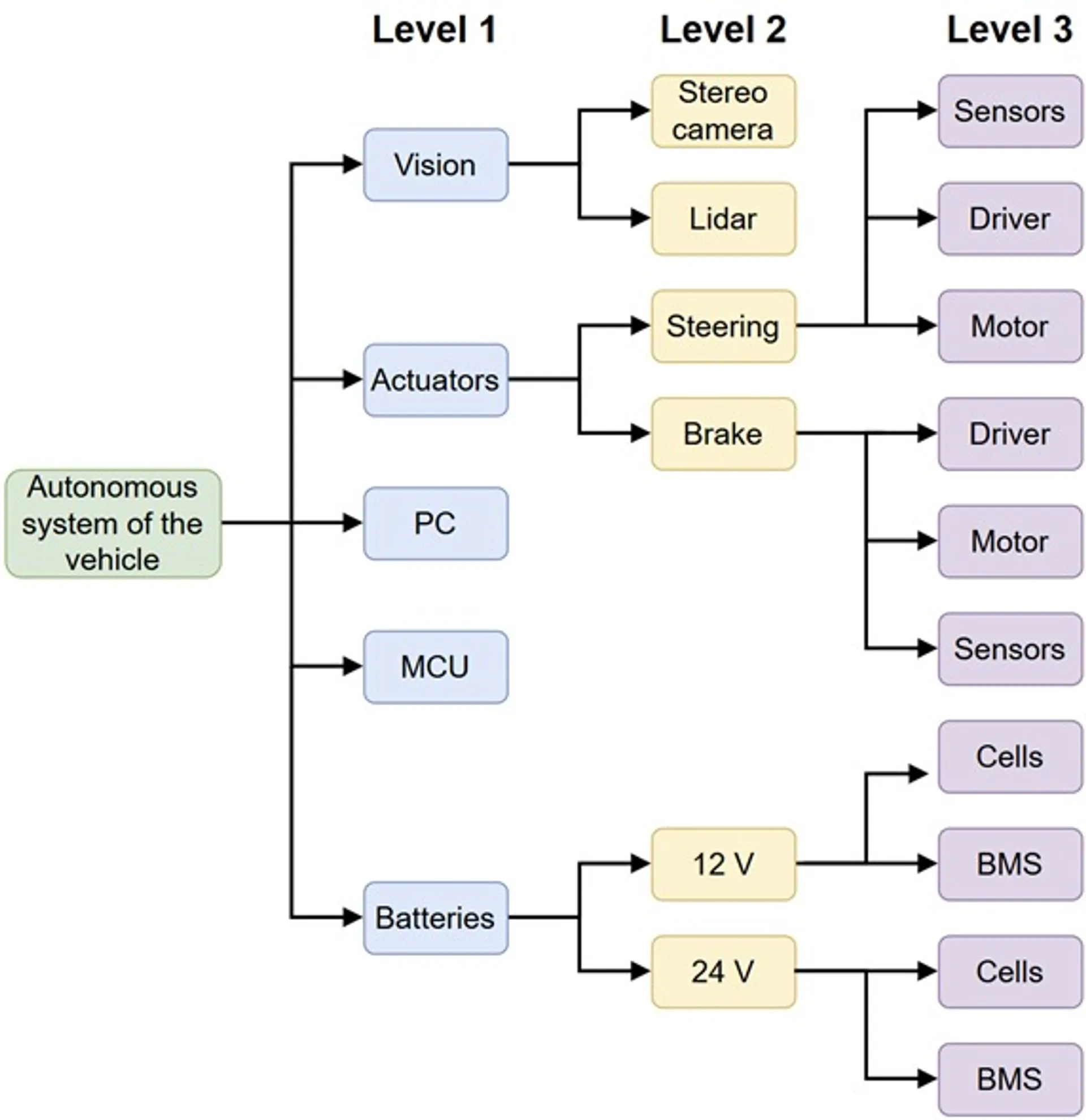
L’affidabilità dei veicoli senza conducente è fondamentale per garantire la sicurezza e la disponibilità operativa in diverse condizioni, senza l’intervento umano. Difetti di progettazione o guasti gravi durante il funzionamento possono comportare rischi significativi per passeggeri, pedoni e altri veicoli. Questo lavoro presenta un’analisi del rischio del sistema senza conducente del veicolo Formula Student del Firenze Race Team utilizzando la metodologia FMECA (Failure Modes, Effects, and Criticality Analysis). Lo studio si concentra sui componenti elettronici ed elettrici chiave, tra cui gli attuatori dello sterzo e dei freni, il sistema di visione, il computer di bordo, la centralina elettronica e il sistema di alimentazione. Per ciascuna modalità di guasto identificata, sono state analizzate le potenziali cause ed effetti per valutarne la criticità. Sulla base di questa valutazione, sono state sviluppate e integrate nel veicolo contromisure mirate per migliorare l’affidabilità e la sicurezza. L’implementazione di meccanismi diagnostici e di sicurezza ha portato a un miglioramento del rilevamento e della mitigazione dei guasti, aumentando la robustezza complessiva del sistema senza conducente.
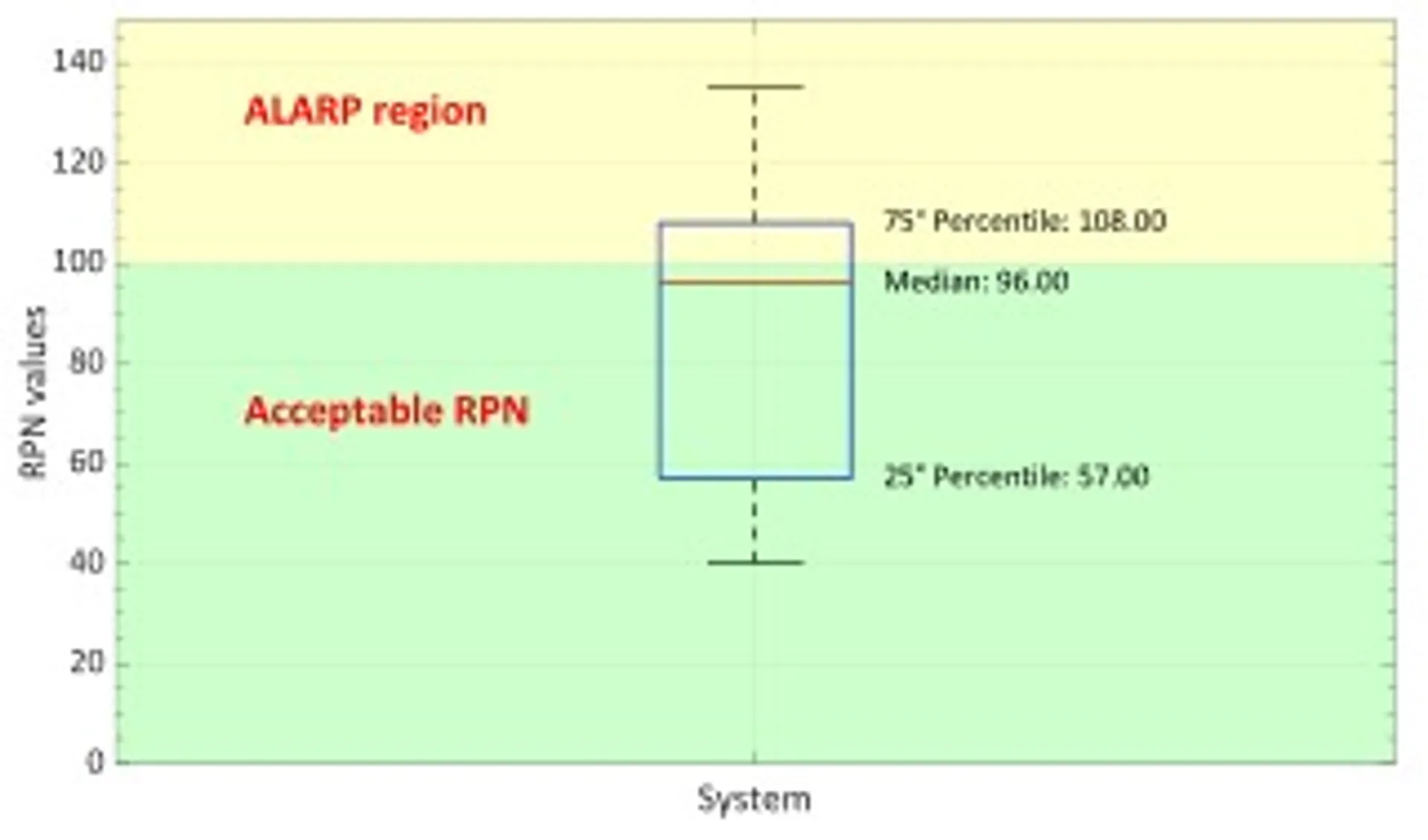
I sistemi di attuazione presentano il rischio più elevato, con modalità di guasto che generalmente presentano RPN più elevati rispetto ad altri sottosistemi. In particolare, la frenata e lo sterzo sono fondamentali sia per il funzionamento che per la sicurezza del veicolo, poiché il loro guasto può portare a situazioni pericolose per il veicolo stesso e per le persone circostanti. Di conseguenza, il grado di gravità per la maggior parte delle modalità di guasto in questi elementi è impostato su 9 o 10, il che indica conseguenze potenzialmente catastrofiche. Inoltre, questi guasti sono spesso difficili da rilevare o prevedere, sia durante la diagnostica rapida che durante il funzionamento in tempo reale, il che porta a punteggi di rilevamento pari a 8 o 9.
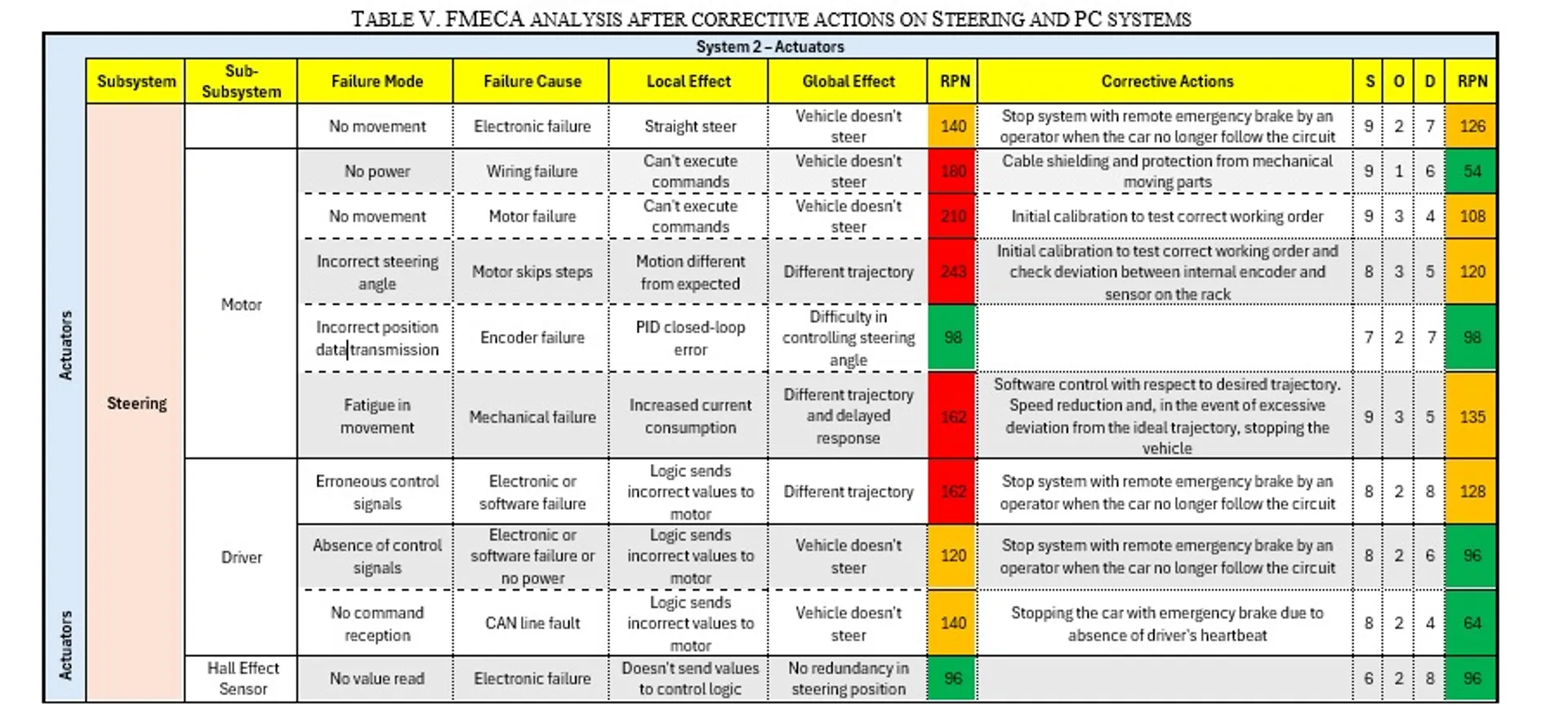
L’analisi FMECA ha permesso di introdurre importanti aggiornamenti nella progettazione del sistema di guida autonoma del veicolo. Al fine di ridurre i valori RPN delle modalità di guasto più critiche, sono stati introdotti sistemi di sicurezza e procedure diagnostiche aggiuntive. La maggior parte delle azioni correttive è stata applicata agli attuatori, al PC di bordo e ai sistemi di alimentazione, grazie ai loro valori RPN più elevati e alla relativa facilità di implementazione dei miglioramenti in questi ambiti. Ad esempio, la contromisura implementata per migliorare la rilevabilità e ridurre il verificarsi di guasti nel sistema sterzante è una procedura di calibrazione del motore elettrico all’avvio. Questa garantisce che il movimento della cremagliera corrisponda al comportamento previsto, confrontando le letture dell’encoder interno del motore con quelle del sensore ad effetto Hall sulla cremagliera. Ringraziamo il Prof. Ciani e il Prof. Patrizi per la loro disponibilità a collaborare alla stesura di questo articolo, che potete trovare nella pagina rassegna stampa.